
从Velodyne的仿真插件开始
我们与Gazebo之间的交互主要是通过插件的形式进行的。而插件的编译和装载过程需要完成三个主要的步骤: (1) 在描述世界或者机器人模型的SDF文件中通过标签<plugin>指定插件的名称和动态连接库xxx.so文件。 (2) 用C++编写插件的接口类并根据不同的插件类型继承Gazebo提供的基础插件类。 (3) 编写CMake或者Make文件指引编译过程生成xxx.so,并通过环境变量${LD_LIBRARY_PATH}告知Linux系统xxx.so在哪个目录下。 更详细的插件开发教程参见官方教程和Gazebo的仿真插件,这里不再赘述。
在机器人操作系统之ROS系列文章中, 我们用SDF文件描述了激光雷达Velodyne HDL-32 LiDAR的结构。 并为之添加了一个插件,使得我们可以通过ROS的接口控制雷达的扫描速度。 这里可以找到根据Gazebo 11的API做了简单调整之后的demo源码。 本文中,我们将在这个demo基础之上添加获取激光雷达的扫描数据,并输出ROS系统的LaserScan消息。
1. 订阅ROS主题控制雷达扫描速度
Velodyne HDL-32 LiDAR是一款32线的雷达。为了模拟多线激光雷达的扫描过程, 我们在SDF文件中将一个32通道的"ray"类型的传感器绕x轴旋转90度放置。 "ray"是Gazebo原生提供的几种传感器之一,主要用于模拟激光测距。我们专门为这个激光雷达创建了插件类VelodynePlugin用于模拟雷达的各种特性,提供Gazebo与ROS之间的通信接口。 由于我们写的是一个模型的插件,所以该类派生自ModelPlugin。
physics::ModelPtr mModel;
physics::JointPtr mJoint;
common::PID mPid;
为了能够控制激光雷达的扫描速度,我们在插件类VelodynePlugin中定义了三个私有的成员变量,如右侧代码所示。其中,指针mModel用于指示激光雷达模型在Gazebo中的对象; 指针mJoint则指示了模型中唯一的旋转自由度,控制雷达的扫描速度实际上就是调整对象mJoint的转速;mPid则是一个PID控制器,用于控制对象mJoint的转速的。
上述的三个成员变量在Load函数中得到初始化,相关的代码片段如下所示。Load函数是Gazebo加载插件并具例化之后首先调用的函数,用于完成插件的各种初始化操作。 该函数有两个参数,其中指针model指示了激光雷达模型在Gazebo中的对象实例,所以在代码片段的第3行中我们直接将之赋予mModel指针。 指针sdf则指向了本插件的SDF元素,我们可以在SDF文件中添加一些配置信息,并通过这个指针加载到程序里。
public: virtual void Load(physics::ModelPtr model, sdf::ElementPtr sdf) {
// ...
this->mModel = model;
this->mJoint = model->GetJoints()[0];
this->mPid = common::PID(0.1, 0, 0);
this->mModel->GetJointController()->SetVelocityPID(this->mJoint->GetScopedName(), this->mPid);
// ...
}
上面的代码片段的第4到6行中通过指针model获取了仿真模型中唯一的自由度,并为之创建了一个PID控制器,通过接口SetVelocityPID将该控制器与mJoint的速度绑定提供速度环控制。 完成上述准备工作之后,我们就可以通过调用如下的接口函数SetVelocity来控制雷达的扫描速度。
public: void SetVelocity(const double &vel) {
this->mModel->GetJointController()->SetVelocityTarget(this->mJoint->GetScopedName(), vel);
}
std::unique_ptr<ros::NodeHandle> mRosNode;
ros::Subscriber mRosSub;
ros::CallbackQueue mRosQueue;
std::thread mRosQueueThread;
准备好上述控制接口之后,我们就可以通过订阅ROS的主题来接收速度控制指令,进而调用函数SetVelocity作出响应。但在这之前,我们还需要给插件添加一些关于ROS的基本对象,如右侧代码所示。 其中,指针mRosNode指向一个ROS的句柄,是我们访问ROS接口的主要对象;对象mRosSub则是一个ROS的消息订阅器,这里被我们拿来订阅控制扫描速度的主题; ROS的回调队列mRosQueue和线程对象mRosQueueThread是ROS节点的运转机制,当回调任务需要被执行的时候都会先将之放置到队列mRosQueue中,再在线程对象中完成回调任务。
然后我们在Load函数中添加如下的配置语句,完成ROS系统的初始化工作,并实例化ROS句柄对象mRosNode。
if (!ros::isInitialized()) {
int argc = 0; char **argv = NULL;
ros::init(argc, argv, "gazebo_demos", ros::init_options::NoSigintHandler);
}
this->mRosNode.reset(new ros::NodeHandle("gazebo_demos"));
接着通过SubscribeOptions订阅主题"/" + this->mModel->GetName() + "/vel_cmd",并注册了回调函数OnVelCmdMsgFromROS,每当接收到了对应主题的消息,
就会向回调任务队列mRosQueue中添加一个回调任务,我们将在ROS任务队列的线程函数中一一处理之。下面代码片段中第4行中完成了任务队列的处理线程的初始化工作,注册了线程函数RosQueueThread。
ros::SubscribeOptions so = ros::SubscribeOptions::create<std_msgs::Float32>("/" + this->mModel->GetName() + "/vel_cmd", 1,
boost::bind(&VelodynePlugin::OnVelCmdMsgFromROS, this, _1), ros::VoidPtr(), &this->mRosQueue);
this->mRosSub = this->mRosNode->subscribe(so);
this->mRosQueueThread = std::thread(std::bind(&VelodynePlugin::RosQueueThread, this));
在下面的订阅消息回调函数OnVelCmdMsgFromROS中,我们从消息数据中获取雷达的目标速度,然后调用接口函数SetVelocity调整雷达转速。
private: void OnVelCmdMsgFromROS(const std_msgs::Float32ConstPtr & msg) {
this->SetVelocity(msg->data);
}
而ROS任务队列的处理线程则在一个while循环中通过ROS的接口callAvailable处理消息回调任务。
private: void RosQueueThread() {
static const double timeout = 0.01;
while (this->mRosNode->ok())
this->mRosQueue.callAvailable(ros::WallDuration(timeout));
}
我们可以通过如下的指令运行编译脚本build.sh编译插件,在编译之前我们需要确保已经source了脚本setup.sh加载必要的配置项。完成编译之后就可以运行gazebo并加载我们的插件。
$ cd gazebo_demos
$ source setup.sh
$ cd demos/velodyne/
$ ./build.sh
$ gazebo velodyne.world
如果一切顺利,我们就可以通过rostopic直接控制雷达的转速了。
$ rostopic pub /my_velodyne/vel_cmd std_msgs/Float32 10.0
2. 发布ROS主题输出激光扫描数据
到目前为止,我们已经能够控制雷达的转速了。但对于一个传感器而言,如果我们不能获取它的数据就有点尴尬了。下面,我们将发布一个ROS的主题,用来输出雷达的扫描数据。
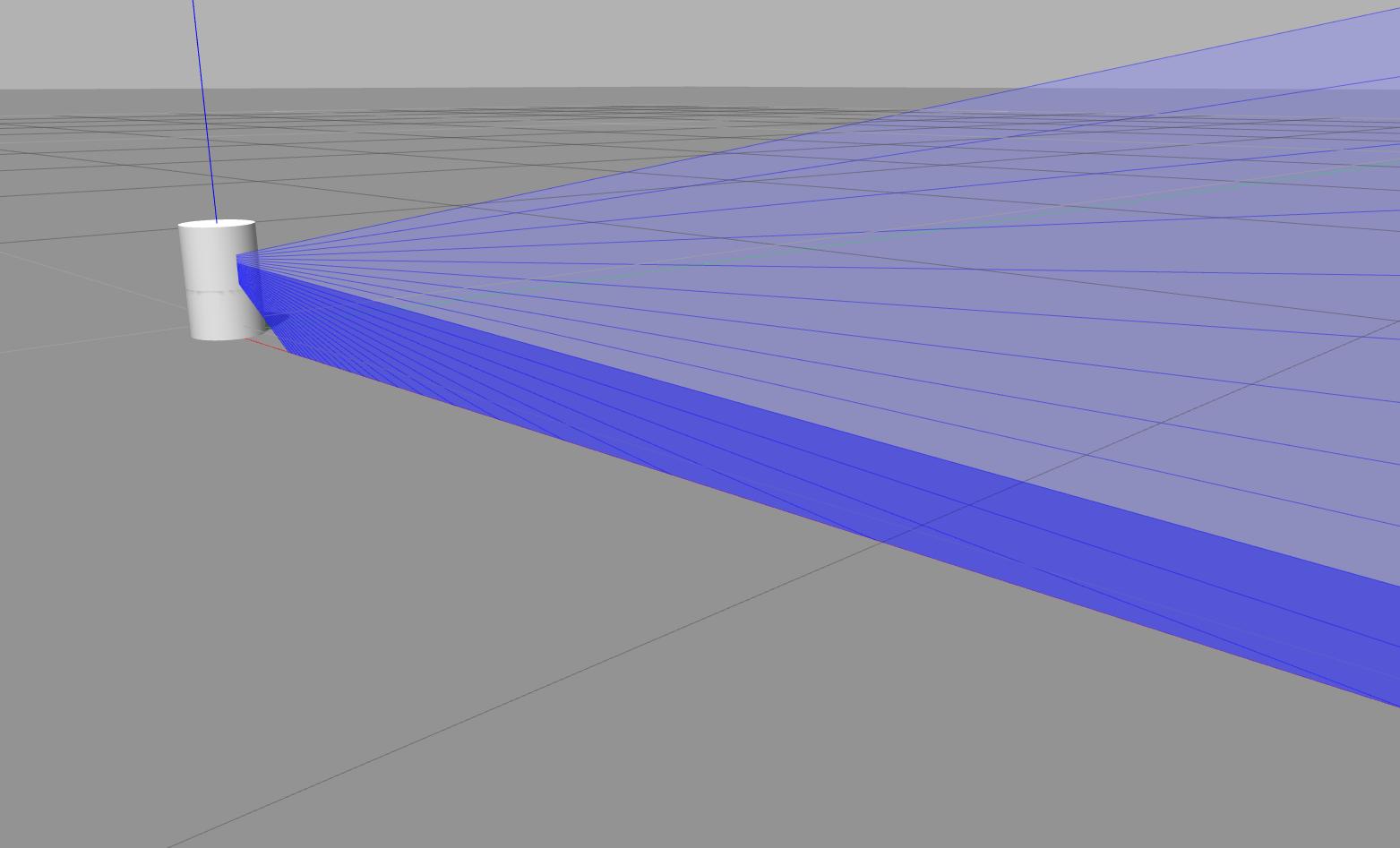
要输出雷达的数据,就需要先从Gazebo的接口中获取"ray"的仿真数据。我们在用SDF文件模拟激光雷达的时候就见到过下面的两幅图。 其中图(a)中蓝色的部分模拟了传感器发出的32束激光,深蓝色部分说明探测到了障碍,浅蓝色的部分则没有。在图(b)中,我们在传感器正前方放置了一个立方体,显然所有的探测光束都检测到了障碍, 所以全部是深蓝色的。图中左上角还有一个对话框,是通过Gazebo的GUI界面上的菜单项Window->Topic Visualization打开的, 修改其中的topic一栏订阅主题"~/my_velodyne/velodyne_hdl-32/top/sensor/scan"得到的。其中形象的展示了激光雷达的扫描数据。
 |
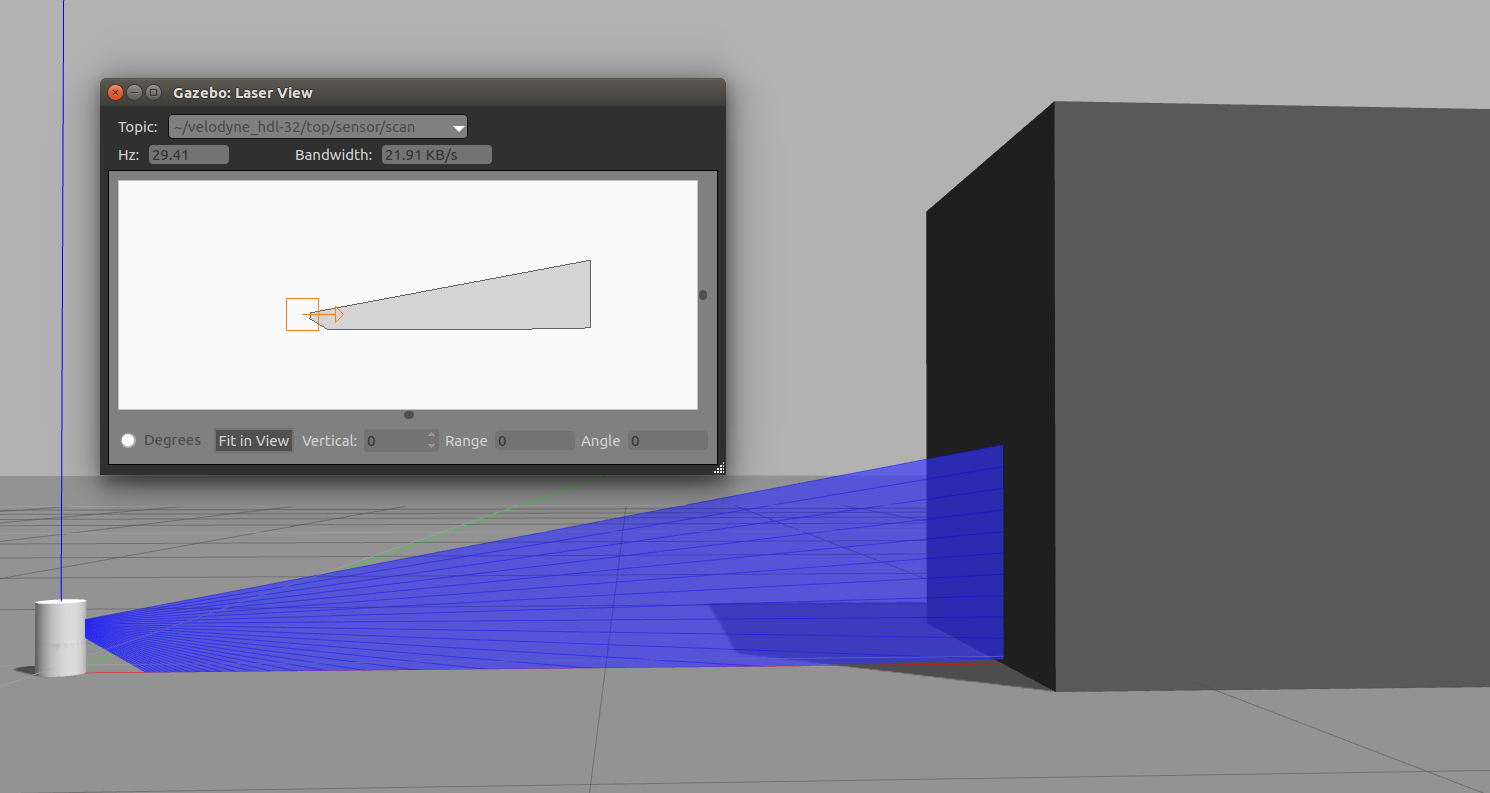 |
| 图1(a). Gazebo下模型"velodyne_hdl-32"在发光 | 图1(b). Gazebo下模型"velodyne_hdl-32"传感器数据 |
也就是说,传感器"ray"在Gazebo中一直在发布一个主题为"~/my_velodyne/velodyne_hdl-32/top/sensor/scan"的消息。 Gazebo也使用了和ROS类似的订阅者和发布者模式进行通信,它们的使用套路基本都一样。 都是构建节点、通过节点创建发布器或者接收器、通过回调函数来处理消息。所以在下面的代码片段中,我们给插件类VelodynePlugin添加了一些成员变量。 其中,mGazeboNode是Gazebo用于通信的节点对象,mLaserScanSub是Gazebo的消息订阅器用来订阅主题"~/my_velodyne/velodyne_hdl-32/top/sensor/scan", 而队列mLaserScanQueue用于缓存需要发布的ROS消息。
gazebo::transport::NodePtr mGazeboNode;
gazebo::transport::SubscriberPtr mLaserScanSub;
std::deque<sensor_msgs::LaserScan> mLaserScanQueue;
在Load函数中,我们增加如下的语句来对Gazebo的通信对象进行初始化。
this->mGazeboNode = gazebo::transport::NodePtr(new gazebo::transport::Node());
this->mGazeboNode->Init();
mLaserScanSub = this->mGazeboNode->Subscribe("~/my_velodyne/velodyne_hdl-32/top/sensor/scan", &VelodynePlugin::OnLaserScanMsg, this);
在Gazebo的消息订阅回调函数OnLaserScanMsg中,我们将Gazebo的消息转换成ROS系统中的LaserScan消息。如下面的代码片段所示,这里我们主要强调消息的时间戳应当是Gazebo消息中记录的仿真时间, 雷达的扫描数据是相对于"top"坐标系的。至于其它字段的填充工作参见源码。 完成消息类型的转换之后,就将转换后的ROS消息放置到队列mLaserScanQueue中,在处理ROS回调任务的线程中发布出去。
private: void OnLaserScanMsg(ConstLaserScanStampedPtr & msg) {
sensor_msgs::LaserScan laser_msg;
laser_msg.header.stamp = ros::Time(msg->time().sec(), msg->time().nsec());
laser_msg.header.frame_id = "top";
// 省略其它laser_msg字段的填充操作
mLaserScanQueue.push_back(laser_msg);
}
我们将ROS回调线程函数修改如下,在一个while循环中检查LaserScan消息队列是否为空,若非空则一一发布之。(貌似这样有资源竞争的问题,暂时先不管他,以后再来处理)。
private: void RosQueueThread() {
static const double timeout = 0.01;
while (this->mRosNode->ok()) {
while (!this->mLaserScanQueue.empty()) {
sensor_msgs::LaserScan &laser_msg = mLaserScanQueue.front();
this->mRosPub.publish(laser_msg);
mLaserScanQueue.pop_front();
}
this->mRosQueue.callAvailable(ros::WallDuration(timeout));
}
}
如果编译运行一切顺利,通过ROS下的可视化工具rviz就可以查看到激光雷达的扫描点了。读者可以把这个rviz配置文件下载下来, 运行如下语句来查看ROS环境下的激光扫描数据,如下图所示。
$ rviz -d rviz_config.rviz
 |
3. 通过tf2发布坐标变换关系
gazebo::common::Time now = this->mModel->GetWorld()->SimTime();
double position = mJoint->Position();
double c = std::cos(position);
double s = std::sin(position);
tf2::Matrix3x3 rot(c, 0, s,
s, 0, -c,
0, 1, 0);
tf2::Vector3 ori(0, 0, 0);
tf2::Transform trans(rot, ori);
geometry_msgs::TransformStamped stampedTrans;
stampedTrans.transform = tf2::toMsg(trans);
stampedTrans.header.frame_id = "base";
stampedTrans.header.stamp = ros::Time(now.sec, now.nsec);
stampedTrans.child_frame_id = "top";
mTfBr->sendTransform(stampedTrans);
现在我们已经在ROS系统中看到了激光雷达的扫描数据,但这还不够,我们还要让rviz中的雷达数据跟着Gazebo的仿真同步转起来。这点可以借助ROS系统中的tf2工具来完成, 我们只需要通过Gazebo的接口不断的查询关节的转角,将之转换成"top"相对于"base"的坐标变换关系,然后通过tf2的坐标变换发布器发布出去就可以了。
要做到这点,我们给插件类VelodynePlugin增加了字段tf2_ros::TransformBroadcaster *mTfBr;,这是一个坐标变换发布器的指针,
同样需要在Load函数中完成初始化操作,只是需要注意这里我们没有使用智能指针,需要自己注意在析构函数中释放该对象。
this->mTfBr = new tf2_ros::TransformBroadcaster();
接下来,我们在回调函数OnLaserScanMsg中添加右侧的代码片段,来获取Gazebo的仿真时间、关节的转角,进而构建tf坐标变换消息,通过刚刚构建的指针mTfBr发布出去。
其中我们需要尤其关注一下第5到7行构建的旋转矩阵rot,这个矩阵实际上是两个次旋转之后的结果。首先因为我们需要将"ray"绕x轴旋转90度放置,仿真多线激光扫描过程的效果。 所以需要先与扫描光束固连的坐标系"top"先乘上一个矩阵\(\begin{bmatrix} 1 & 0 & 0 \\ 0 & 0 & -1 \\ 0 & 1 & 0 \end{bmatrix}\)。接着由于光速在不断的绕着z轴转动, 所以需要在乘上一个z轴的基础旋转矩阵\(\begin{bmatrix} c & -s & 0 \\ s & c & 0 \\ 0 & 0 & 1 \end{bmatrix}\)。两个矩阵相乘之后就得到了代码中所描述的姿态关系。
最后在15行通过指针mTfBr将构建好的坐标变换消息发布出去。此时如果运行仿真,并通过ROS的topic发布转速控制消息,就可以在rviz中看到雷达的扫描数据跟着Gazebo的仿真同步转动。
4. 完
在本文中,我们先简单回顾了一下Gazebo的插件介绍如何在Gazebo中订阅ROS的消息,进而实现控制雷达转速的功能。接着对插件进行扩展,获取了雷达扫描数据, 并将之打包进一个ROS的消息中发布出来。此外,还了解了如何获取Gazebo的仿真时间、关节的位置,以及如何发布tf坐标变换消息。最终在可视化工具rviz中看到雷达的扫描数据跟着Gazebo的仿真同步转动。