
双足机器人迷の图鉴之ASIMO
ASIMO是日本本田公司(HONDA)机器人技术的最新产品,代表着世界上最先进的技术。 他们希望打造一款能够与人类共存的机器人,可以在人类社会中担任一定的角色,协助并陪伴人类完成各种工作。 ASIMO是人类的小伙伴,不是工业机器人那样针对特殊目的而设计的机械。
HONDA从1986年开始双足机器人的研发,他们花费了6年的时间研究双足行走的结构和方法, 又用了3年的时间得到能够上下台阶、稳定行走在斜坡路面的实验机。 经历了P1, P2, P3三台原型机,HONDA终于在2000年10月31日推出了第一代的ASIMO机器人,前后一共经过了15年的时间。 在2005年12月份,HONDA又推出了新一代的ASIMO,相比于第一代在运动能力和传感能力上得到了很大的提升, 已经可以在一些重大场合提供迎宾服务了。
发展历史
1986年,HONDA开发了第一款行走的机器人E0。这款机器人只有两条腿的结构,只能沿直线缓慢的行走(一步需要5秒钟)。 这是一种被称作静态步态(static walking)的方法,只有当两只脚都支撑在地面上了才开始行走下一步。 而且在开始下一步时首先需要将重心移到一只脚上,使其能够支撑起全身的重量,才开始抬起另一只脚。 可以想象这是一种迥异于人类行走姿态的缓慢过程。
为了提高行走速度,适应不平的路面,就必须改变静态步态中重心集中在一个支撑脚上的限制。 从1987到1991年间,HONDA研究人类和动物的行走方式又陆续开发了E1, E2, E3三款实验机, 在这些实验机上实现了一种动态步态(dynamic walking)的行走方法。 动态步态更接近于人类的行走方式,在向前行走时会短暂的失去平衡,在摔倒之前人们会及时地向前伸出一条腿支撑以恢复平衡。 这其实就是一个不断失去平衡恢复平衡的周期过程。E2机器人就已经能够在平整路面上快速行走了,速度能达到1.2km/h。 结构上仍然只有两条腿,但行走过程已经相当自然了。
接下来的1991年到1993年间,重点实现双足行走的稳定控制。 期间HONDA又造了E4, E5, E6三台样机,这些样机可以实现平地的稳定行走,上下台阶,斜坡路面的行走。 结构上仍然只有两条腿,但增加了一些传感器用来测量地面的反作用力。 算法上基于零力矩点(ZMP)这一稳定性判据做了改进, 根据地面的反馈规划能够保持稳定的落脚点。
在得到稳定的双足行走的结构和算法后,HONDA从1993年开始致力于研制人形机器人的原型机。 P1是HONDA尝试加上上身的第一台机器人,有1.9米高,175公斤重。 这款机器人可以控制外部电源和计算机的开关,抓住门把手,拾取地上的物体。对于它的研究集中在上身与下肢之间的协调控制上。 此时还没有为P1设计外观,可以看到裸露在外的机械结构和电线。
1996年的12月份,HONDA实现了世界上第一个自主控制的双足仿人机器人P2。有1.8米高,210公斤重。 在躯干中包装了计算机、电机驱动、电池、无线通信等必要的设备使得P2能够自主的运动,执行诸如行走、上下楼梯、推车等任务。 P2能够在不平路面上行走,即使用手去推它都可以保持平衡。 1997年9月份,HONDA推出了完全自主的P3机器人。外形上它更接近于人类,有1.6米高,130公斤重。 使用了复合材料在重量上有了大幅的降低,另一方面也分散了控制系统,使得尺寸可以相对降低一些,能够更轻松的适应人类环境。
经历了超过15年的研究和开发过程,HONDA于2000年和2005年先后推出了两代ASIMO机器人,代表了目前世界上最先进的仿人机器人技术。 大体上,他们的研发过程经历了三个阶段:a. 研究人类的行走方式实现两条腿自然快速的行走; b. 在动态步态的基础上研究如何保持运动过程中的平衡,从而在不平路面上行走;c. 加上上身研究四肢的协调控制。 后来,HONDA还在ASIMO身上加入了诸如红外、图像等用于环境感知的传感器,附加了人体识别、路径规划一类的人工智能技术, 为了ASIMO能够在人类社会中与人类和谐共处。
ASIMO的构造
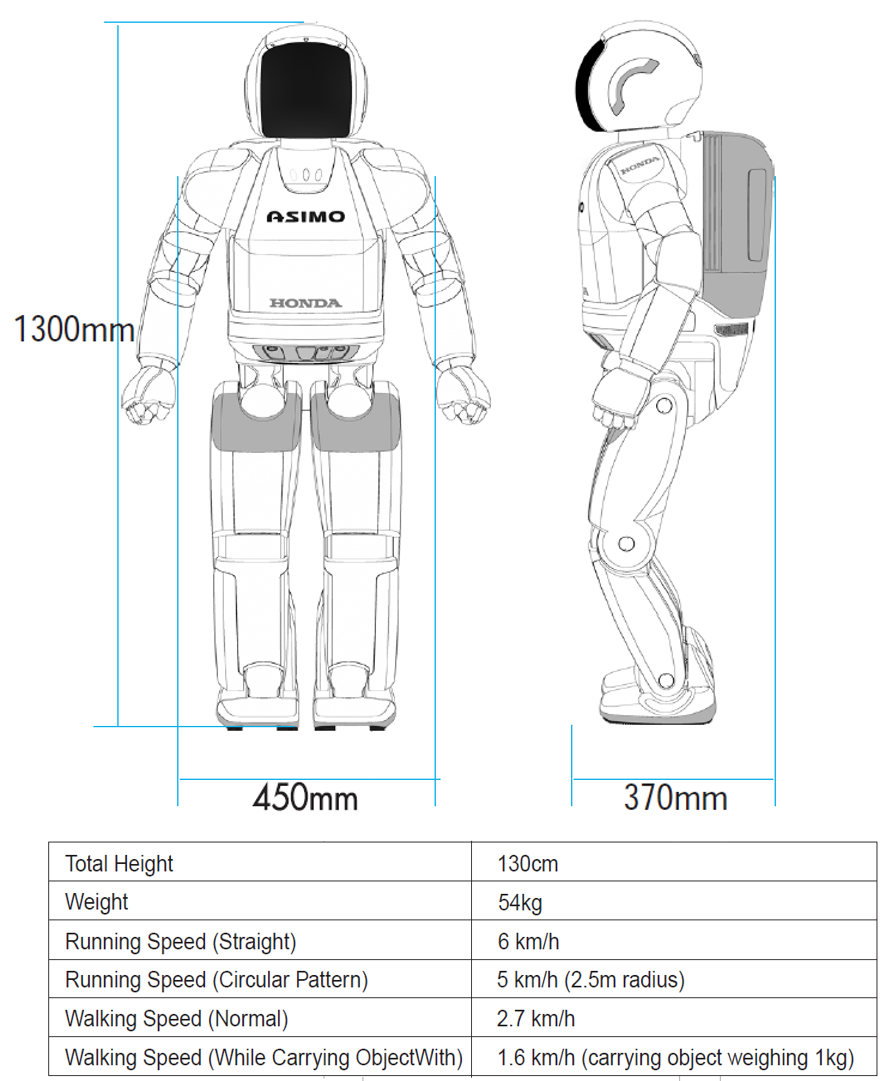
ASIMO的身高只有1.3米。HONDA研究了人们的生活和工作的环境后,认为1.3米左右是一个适合人类环境,而且能够被人类能接受的身高。 因为,一般电灯的开关安装在墙壁1.1米左右的高度,门把手在1米左右的位置,而桌子的高度则通常为0.7米左右。 所以1.3米能够完成搬运东西、开关灯等日常任务。而这个高度与人们坐下的高度差不多,太高的话人类会感到压力,太矮的话交流不方便, 因此保留一个儿童的身高正合适。
体重对于机器人而言是一项重要的参数,ASIMO体重54公斤与人类的体重差不多。可以想象,体重过重的话就会对电机和能源有更高的要求。 系统的功耗会很大,对于电池供电的ASIMO而言直接影响了其续航能力。而且惯性也会很大,不利于稳定控制。 功率的因素要求体重越轻越好,但是还需要保证结构的强度。因此,HONDA选择了比较轻的镁合金制作ASIMO的结构,用复合树脂制作外壳。
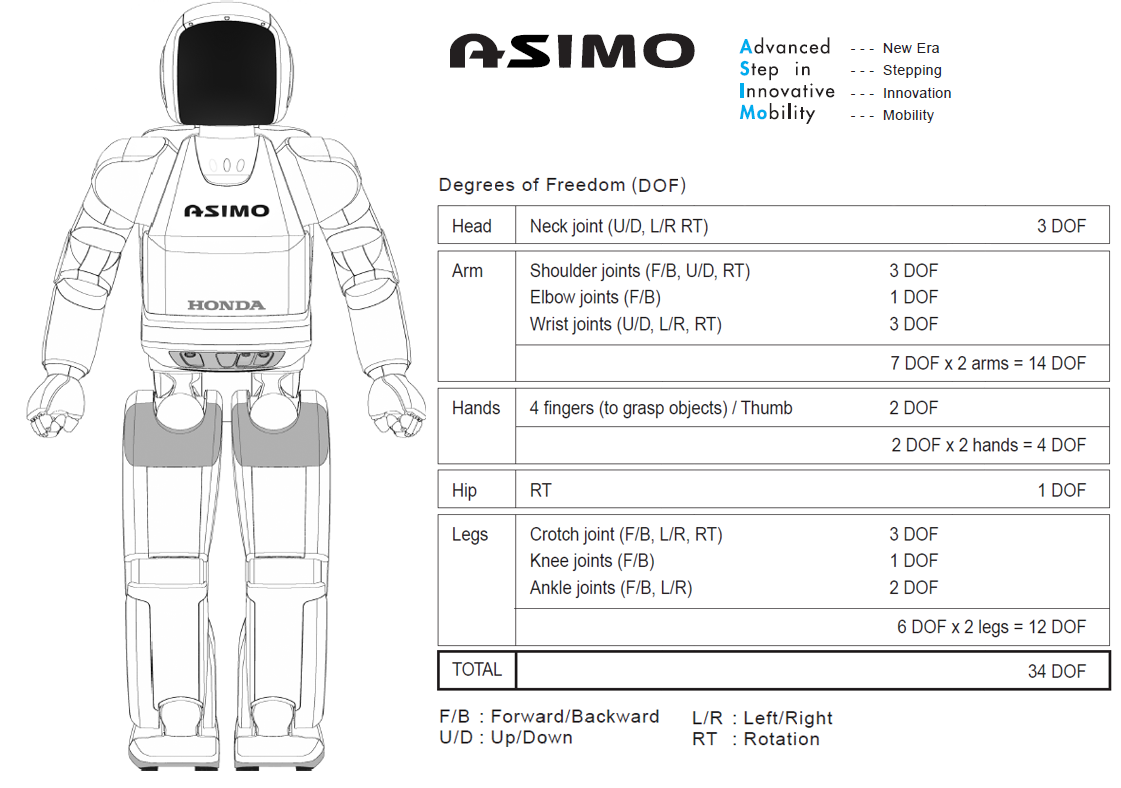
ASIMO是通过51.8V的可充电锂离子电池(Li-ION)供电的,一次充电可以工作一个小时。电池安装在背上的背包位置,接近6公斤重。 它一共有34个自由度,可以以每小时6公里的速度奔跑。它的每条腿有6个自由度,能够在不平路面上行走,上下台阶。 每个手臂有7个自由度,手上有两个自由度可以抓取物体,头部有3个自由度。 各个自由度一般都是由无刷直流伺服电机和谐波减速器驱动的。
为了能够及时的获得机器人的姿态,在ASIMO的躯干上还安装有陀螺仪和加速度计。 利用这些惯性传感器的数据可以通过四元素和卡尔曼滤波等算法解算出机器人的姿态,反馈给控制器。 基于ZMP方法实现稳定行走,只有姿态数据是不够的,还需要测量地面对支撑脚的作用力。 因此HONDA给ASIMO的两个脚上安装了两个六维力和力矩传感器,用于稳定控制。
ASIMO的设计目标就是要能够人性化的与人交流,能够适应人类的工作生活环境。 它可以与人握手,完成这一项任务,需要在手腕上加装一个力和力矩传感器,感知和控制手臂输出的力。 在ASIMO的腰部还有一个超声波传感器,能够探测到3米以内的障碍物。 另外腰部还有一个由激光和红外传感器组成的地面传感器,能够探测2米以内的环境,可以用来创建地图,实现自主导航。 在头部还有两个视觉摄像头,就像两个眼睛一样感知环境。
此外,ASIMO身上还附加了语音识别、人机对话的人工智能,可以接受人类的一些指令。 头部的两个摄像头还可以通过图像处理算法实现人体识别,读懂人类的手势。 这些人工智能的算法,赋予了ASIMO强大的交流能力。
计算机架构
目前,我还没有找到关于2005年发布的ASIMO的计算机体系结构的文章。 但由于各个型号之间具有比较强的延续性,我们可以从1998年Hirai等人发表在ICRA的介绍P2的文章,以及2002年Sakagami等人发表在IROS的介绍ASIMO的智能系统的文章,管窥一二。
P2
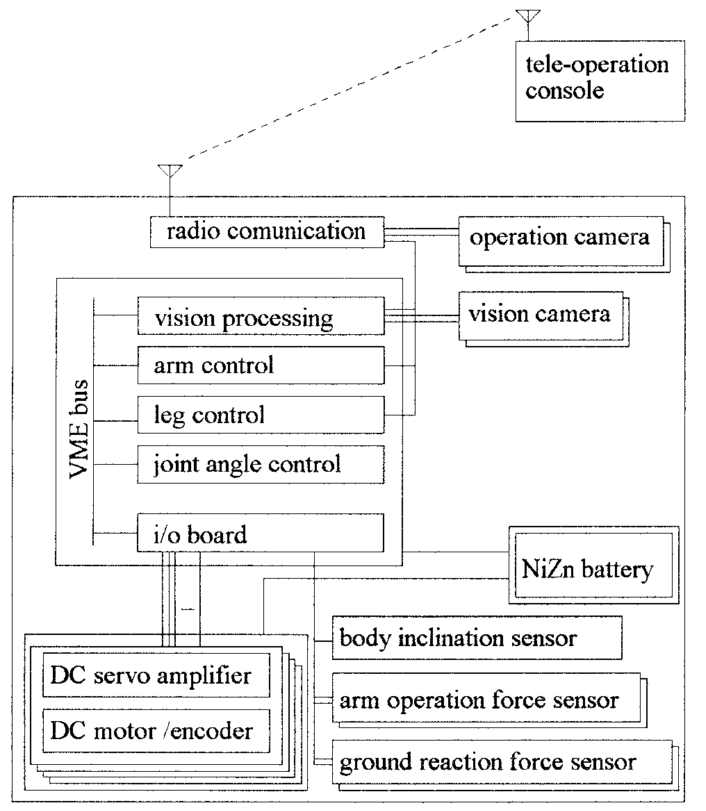
P2身高1米82,体重210公斤,具有完整的四肢结构,能够通过无线通信。 控制计算机放置在躯体里,由四个运行着VxWorks实时操作系统的处理器构成。 这四个处理器分别用来实现手臂(arm control)、腿(leg control)、关节转角(joint angle control)的控制以及视觉处理(vision processing)。它们与输入输出控制板(i/o board)之间通过总线(VME bus)连接。
i/o board与各种输入输出设备连接,它接收来自电机编码器(DC motor/encoder)的反馈, 并转发电机控制信号到电机伺服放大器(DC servo amplifier)来驱动电机转动。 此外,它还接收了姿态传感器(body inclination sensor, 加速度计和陀螺仪), 机械手和地面作用力反馈力和力矩传感器(arm operation force sensor & ground reaction force sensor)。
P2使用一个镍锌电池(NiZn battery)给机器人供电,差不多有20公斤重,可以驱动P2工作15分钟。当然,P2也是可以外供电的。
在P2的头部一共装了4个摄像头,其中两个用来做机器视觉,可以自由的转动,称为(vision camera),直接与视觉计算机相连。 另外两个摄像头则是用来做远程控制(tele-operation)的,称为(operation camera)。
P2有一个无线以太网模块,可以与外部的控制台(tele-operation console)通信。
第一代ASIMO智能系统
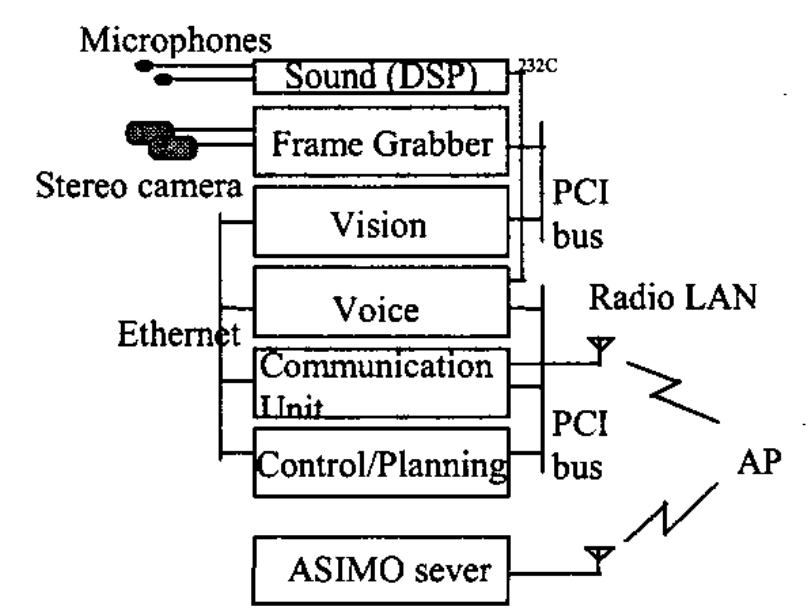
相比于P2,ASIMO是一个更加智能的机器人。 装有用于日常人机交互的视觉和听觉系统,整个智能系统(intelligence system)包括:一个影像采集卡,一个用于图像处理的PC机, 一个用于语音识别和处理的PC机,一个用于控制和规划的处理器,一个用于与外部系统通信的无线通信模块, 和一块用于检测声音来源的DSP。不同的处理器之间通过以太网连接,它们工作在不同的计算频率上。
图像处理系统是独立于控制系统的,数据量大算法复杂处理过程长。 因此为了保证高速的数据通信,影像采集卡与处理图像的PC机之间通过PCI总线连接。 此外在ASIMO的头部还安装了两个摄像头,可以计算深度生成立体视觉。 而声音系统则相对较快,DSP与声音处理PC机之间通过232串口连接,在头部还装了两个麦克风连接到了DSP上用于检测声源。
在ASIMO的外部还有一台计算机(ASIMO Server),在该计算机上运行着用于导航和特定任务的地图管理系统。 它可以通过无线网络给ASIMO发送指令。此外,在Server上还运行这一个用于人脸识别的数据库。
在ASIMO的各个计算机上运行着不同的操作系统,有一个信息板(message board)来同步系统内部的信息。 控制系统(Control System)因为需要操纵各个执行器,需要快速实时的系统,而视觉系统则是一个相对较慢的系统。 规划系统(Planning System)同时运行着快速的壁障系统和慢速的路径生成系统。
结束语
本田经过了十多年的技术积淀,打造的这款机器人无论在机械、控制还是外观设计上都做得相当出色,可以说是代表着世界上最先进的机器人技术。 我也真心希望未来机器人能够走到人类的生活当中,充当助手和伙伴。