
加快QR算法的收敛过程
QR 算法的数学形式非常优美,但是它的计算量有些大,每一步迭代都需要进行一次 QR 分解和一次矩阵乘法,时间复杂度是 \(O(n^3)\)。 根据收敛原理, 我们知道它的收敛速度取决于所有特征值的比例关系 \(|\lambda_i / \lambda_j|, |\lambda_i| < |\lambda_j|\) 中最大的那个。 如果有某两个特征值的绝对值比较接近,那么 QR 算法的收敛速度就会很慢。为了工程实用,我们有必要对 QR 算法加速,可用的手段无非两种:
- 其一,压缩每次迭代的运算量。也就是想办法避免,复杂度较高的 QR 分解和乘法运算。这点可以通过隐式QR迭代算法来实现。
- 其二,加快迭代的收敛过程。要么对矩阵做些预处理选择一个合理的迭代初值,要么迭代过程中对矩阵做些变形加快收敛。
本文我们从 Schur 分解定理出发,研究一种常用的初值 Hessenberg 矩阵。再研究带偏移量的 QR 迭代法,该方法与带偏移量的逆幂法类似,可以加快收敛。
1. Schur 分解定理
在复数域 \(\mathbb{C}\) 中,任何一个\(n \times n\) 的方阵 \(\boldsymbol{A} \in \mathbb{C}^{n\times n}\),都可以通过酉矩阵 \(\boldsymbol{Q}\)变换成一个上三角矩阵 \(\boldsymbol{U}\)。 即,\(\boldsymbol{Q}^*\boldsymbol{A}\boldsymbol{Q} = \boldsymbol{U}\)。其中 \(\boldsymbol{Q}^*\) 是矩阵 \(\boldsymbol{Q}\) 的共轭转置。 酉矩阵是正交矩阵在复数域上的推广,在复数域 \(\mathbb{C}\) 中,如果一个矩阵 \(\boldsymbol{Q}\) 的共轭转置\(\boldsymbol{Q}^*\)就是它的逆 \(\boldsymbol{U}^{-1}\), 那么我们就称 \(\boldsymbol{U}\) 为酉矩阵。该矩阵具有性质 \(\boldsymbol{U}^* \boldsymbol{U} = \boldsymbol{U} \boldsymbol{U}^* = \boldsymbol{I}\)。 这就是著名的 Schur 分解定理。它可以通过数学归纳法来证明,网络上有很多资料,这里不再重复了。
在实数域 \(\mathbb{R}\) 中,矩阵 \(\boldsymbol{A}\) 的特征值有可能是个复数。此时就不能在实数域中,找到一个正交矩阵 \(\boldsymbol{Q}\) 将其相似变换到上三角矩阵中了。 因为相似变换会保持矩阵的特征值不变,而上三角矩阵的对角线上的元素就是其特征值。如果在域 \(\mathbb{R}\) 中 \(\boldsymbol{A}\) 与上三角矩阵 \(\boldsymbol{U}\) 相似, 那么 \(\boldsymbol{U}\) 对角线上的元素就是 \(\boldsymbol{A}\) 的特征值。这与 \(\boldsymbol{A}\) 存在复特征值矛盾。
尽管如此,在实数域 \(\mathbb{R}\) 中,我们还是可以将任意的 \(\boldsymbol{A}\) 相似变换到一个十分接近上三角形式的矩阵 \(\boldsymbol{R}\) 上。 有 实 Schur 分解定理:
看到这两个定理之后,我一直觉得 QR 迭代最后的收敛形式就是这个 Schur 分解,但是我一直没有找到证明过程,也有可能是没看懂错过了。 我看到很多材料都在说,进行 QR 迭代之前可以先将目标矩阵相似到一个 Hessenberg 形式的矩阵上,在后续的迭代过程中迭代矩阵将一直保持 Hessenberg 的形式。 但是我在想 Schur 分解得到的近似上三角矩阵也是 Hessenberg 形式呀。QR 迭代要收敛到上三角矩阵,Schur 分解看样子像是最简形式呀,要收敛不应该就刚刚好到这种形式上吗。
2. Hessenberg 矩阵
在一个 \(n \times n\) 的矩阵中,如果 \(a_{ij} = 0\) 对所有 \(i > j + 1\) 的元素都成立,那么它就是上 Hessenberg 形式的矩阵。 如果对所有 \(j > i + 1\) 的元素都成立,那么它就是下 Hessenberg 形式的矩阵。如下所示,如果下次对角线以下的所有元素为 0 的矩阵就是上Hessenberg矩阵。 如果上次对角线以上的元素全为 0 就是下Hessenberg矩阵。显然,对角阵、三角阵都是 Hessenberg 阵。这里我们只关注上 Hessenberg 矩阵。
$$ \underbrace{\begin{bmatrix} a_{11} & a_{12} & a_{13} & a_{14} \\ a_{21} & a_{22} & a_{23} & a_{24} \\ 0 & a_{32} & a_{33} & a_{34} \\ 0 & 0 & a_{43} & a_{44} \\ \end{bmatrix}}_{上Hessenberg矩阵} \qquad \underbrace{\begin{bmatrix} a_{11} & a_{12} & 0 & 0 \\ a_{21} & a_{22} & a_{23} & 0 \\ a_{31} & a_{32} & a_{33} & a_{34} \\ a_{41} & a_{42} & a_{43} & a_{44} \\ \end{bmatrix}}_{下Hessenberg矩阵} $$任何方阵都可以通过 Householder 矩阵转换成 Hessenberg 矩阵。 给定任意向量\(\boldsymbol{x} = \begin{bmatrix} x_1 & \cdots & x_n \end{bmatrix}^T\) 我们总是可以构造出一个 Householder 矩阵 \(\boldsymbol{H}\), 将其映射到向量 \(\boldsymbol{y} = \begin{bmatrix} \alpha & \cdots & 0 \end{bmatrix}^T\) 上,其中 \(\alpha = \pm \| \boldsymbol{x} \|\)。Householder 矩阵 \(\boldsymbol{H}\) 本身就是正交的。 利用这两个特性,就可以构造相似变换,消除次对角线以下的元素。比如说一个 \(4 \times 4\) 的矩阵 \( \boldsymbol{A} = \begin{bmatrix} a_{11} & a_{12} & a_{13} & a_{14} \\ \hline a_{21} & a_{22} & a_{23} & a_{24} \\ a_{31} & a_{32} & a_{33} & a_{34} \\ a_{41} & a_{42} & a_{43} & a_{44} \\ \end{bmatrix} \) 我们需要对其进行相似变换之后,使得 \(a_{31}, a_{41}, a_{42}\) 所在位置的元素为0。对于第一列,我们可以先根据子向量 \(\boldsymbol{a}_{21} = \begin{bmatrix} a_{21} \\ a_{31} \\ a_{41} \end{bmatrix}\) 构建一个 \(3\times 3\) 的 Householder 矩阵 \(\boldsymbol{H}_{21}\), 进而构造块对角矩阵 \(\boldsymbol{Q}_{1} = \begin{bmatrix} 1 & \boldsymbol{0} \\ \boldsymbol{0} & \boldsymbol{H}_{21}\end{bmatrix}\)。 因为 \(\boldsymbol{Q}_1\) 的左上对角块是个 \(1 \times 1\) 的单位矩阵,所以它左乘矩阵 \(\boldsymbol{A}\) 将保持第一行不变,同时消除第一列的最后两项。 矩阵 \(\boldsymbol{Q}_1\) 的转置也是相同形式的块对角矩阵 \(\boldsymbol{Q}_{1}^T = \begin{bmatrix} 1 & \boldsymbol{0} \\ \boldsymbol{0} & \boldsymbol{H}_{21}^T\end{bmatrix}\)。 所以将其右乘到矩阵之后将保持原矩阵的第一列不变,于是有 \( \boldsymbol{A}_2 = \boldsymbol{Q}_1\boldsymbol{A}\boldsymbol{Q}_1^T = \left[ \begin{array}{c|c} a_{11} & \begin{array}{} \tilde{a}_{12} & \tilde{a}_{13} & \tilde{a}_{14} \end{array} \\ \hline \begin{array}{} \tilde{a}_{21} \\ 0 \\ 0 \end{array} & \begin{array}{} \tilde{a}_{22} & \tilde{a}_{23} & \tilde{a}_{24} \\ \hline \tilde{a}_{32} & \tilde{a}_{33} & \tilde{a}_{34} \\ \tilde{a}_{42} & \tilde{a}_{43} & \tilde{a}_{44} \\ \end{array} \end{array} \right] \)。然后我们对第二列的子向量 \(\tilde{\boldsymbol{a}}_{22} = \begin{bmatrix} \tilde{a}_{32} \\ \tilde{a}_{42} \end{bmatrix}\) 构造 \(2 \times 2\) 的矩阵 \(\boldsymbol{H}_{32}\), 进而构造块对角矩阵 \(\boldsymbol{Q}_2 = \begin{bmatrix} 1 & & \\ & 1 & \\ & & \boldsymbol{H}_{32} \end{bmatrix}\)。于是有 \( \boldsymbol{A}_3 = \boldsymbol{Q}_1\boldsymbol{A}_2\boldsymbol{Q}_1^T = \begin{bmatrix} a_{11} & \tilde{a}_{12} & \tilde{a}_{13} & \tilde{a}_{14} \\ \tilde{a}_{21} & \tilde{a}_{22} & \tilde{a}_{23} & \tilde{a}_{24} \\ 0 & \tilde{a}_{32} & \tilde{a}_{33} & \tilde{a}_{34} \\ 0 & 0 & \tilde{a}_{43} & \tilde{a}_{44} \\ \end{bmatrix} \)。
完整的实现,参见例程 UpperHessenberg。
3. QR 迭代收敛对比
我们可以通过一次迭代前后矩阵的差 \(\boldsymbol{A}_{k+1} - \boldsymbol{A}_{k}\) 中最大绝对值是否小于一个很小的数来判定算法是否收敛了。 即,\(\max(|\boldsymbol{A}_{k+1}(i,j) - \boldsymbol{A}_{k}(i,j)|) < \varepsilon\)。为了验证算法的收敛速度, 我们在 EigenShiftQR 中用成员函数 NaiveIterate 重新实现了一遍朴素的 QR 迭代。一方面引入了算法收敛的判定,收敛后将终止迭代并返回实际迭代次数。另一方面优化了一些数据结构,避免在迭代过程中频繁构建并销毁对象。 细节还请查看代码。
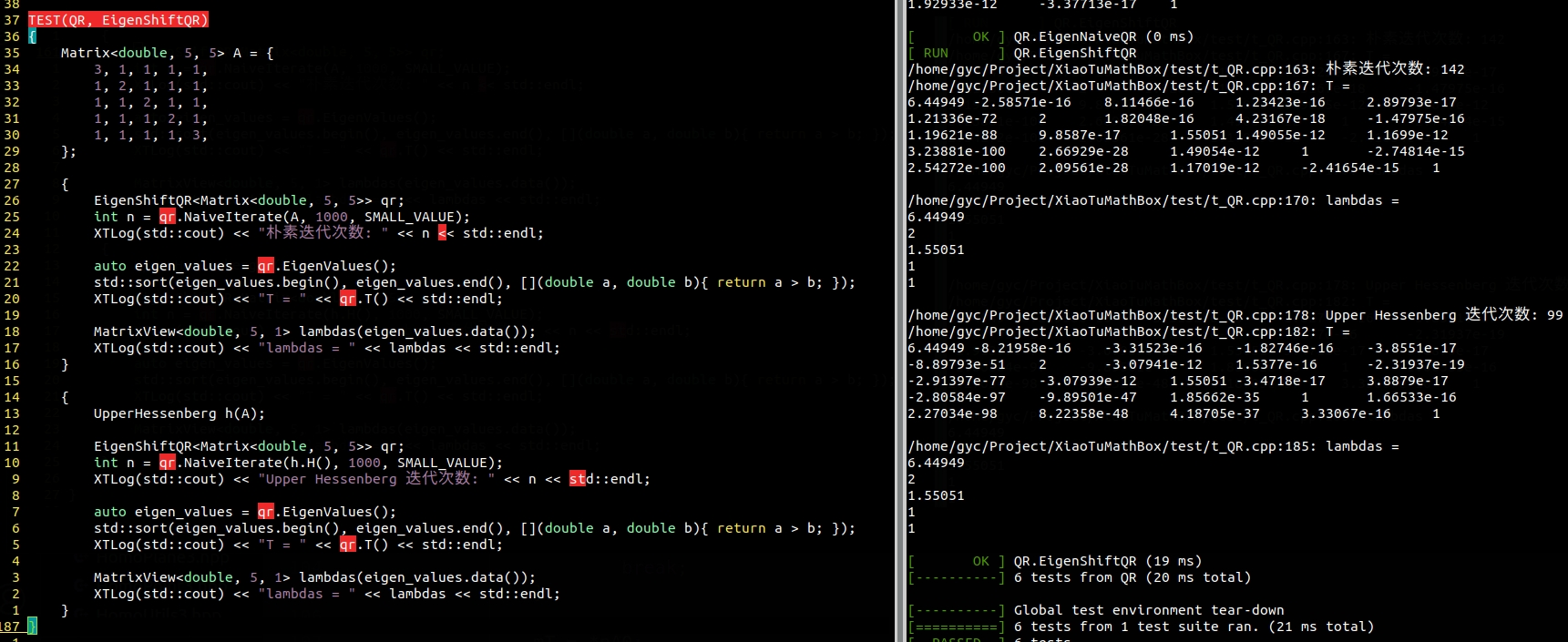
如下截图所示,我们对\(5 \times 5\)的矩阵 \(\begin{bmatrix} 3& 1& 1& 1& 1 \\ 1& 2& 1& 1& 1 \\ 1& 1& 2& 1& 1 \\ 1& 1& 1& 2& 1 \\ 1& 1& 1& 1& 3 \\ \end{bmatrix}\) 分别使用朴素的 QR 和经过 Hessenberg 矩阵预处理的朴素QR迭代。从日志结果来看,朴素QR需要迭代142次,而Hessenberg预处理之后则只需要99次。看起来有个好初值收敛会快一点。
4. 带偏移量的 QR 迭代法
| 1: | 若 \(\max(|\boldsymbol{A}_{k+1}(i,j) - \boldsymbol{A}_{k}(i,j)|) ≥ \varepsilon\) 则: |
| 2: | 选择一个偏移量 \(\sigma_k\) |
| 3: | \([Q_k, R_k]\) = QR(\(A_k - \sigma_k I\)) |
| 4: | \(A_{k+1}\) = \(R_k Q_k + \sigma_k I\) |
实际上 QR 迭代过程还可以进一步的通过偏移量来加快收敛速度。我们知道正常的朴素QR迭代过程就两步: ① 进行 QR 分解,② 交换相乘。如果我们在 QR 分解的时候将对角线上的元素都减去一个常数 \(\sigma\), 并在交换相乘之后再把这个常数加回来。如此迭代的过程就是带偏移量的 QR 迭代。
整个迭代过程类似左侧的伪代码。其中,\(\boldsymbol{A}_{k+1} = \boldsymbol{R}_k \boldsymbol{Q}_k + \sigma_k \boldsymbol{I}\) 仍然与原矩阵相似。
$$ \boldsymbol{A}_{k+1} = (\boldsymbol{Q}_k^T \boldsymbol{Q}_k)\boldsymbol{R}_k \boldsymbol{Q}_k + \sigma_k \boldsymbol{I} = \boldsymbol{Q}_k^T (\boldsymbol{A}_k - \sigma_k \boldsymbol{I})\boldsymbol{Q}_k + \sigma_k \boldsymbol{I} = \boldsymbol{Q}_k^T \boldsymbol{A}_k \boldsymbol{Q}_k $$只是 \(\sigma_k\) 的选择对于迭代过程的影响很大。如果我们选择一个固定的 \(\sigma\) 在整个迭代过程中都不变动,那么相当于是先对矩阵 \(\boldsymbol{A} - \sigma\boldsymbol{I}\) 进行朴素QR迭代,\(\boldsymbol{R}_k \boldsymbol{Q}_k\) 的对角线会收敛到特征值 \(\lambda_i - \sigma\)。由于朴素的QR迭代收敛之后,对角线上的特征值是按照绝对值大小排序的。 所以\(\boldsymbol{R}_k \boldsymbol{Q}_k\)对角线的元素是按照\(|\lambda_i - \sigma|\)的大小排序的。最后输出的\(\boldsymbol{A}\)的特征值也将如此排序,即按照到偏移量的距离排序。
如果我们选择的偏移量刚好就是某个特征值,那么经过一次迭代之后,我们就可以从矩阵的右下角读出改特征值了。在迭代的过程中,矩阵逐渐收敛到上三角形式,对角线上的元素逐渐接近特征值。 那么我们可以选择右下角的元素作为每次迭代的偏移量 \(\sigma\)。这样据说可以加快收敛。 我们在 EigenShiftQR 中用成员函数 Iterate 就是按照这种方式实现的。 如下图所示,带上 Hessenberg 初始化之后 44 次迭代就可以收敛了。

5. 完
本文本来是想研究一下如何加速QR迭代,写着写着插入了实 Schur 的形式。关于QR迭代的收敛结果我又有了一点新的疑问。 后来看到有些材料说还有双位移的QR迭代,据说这个可以得到实Schur的形式。我想如果真是这样,这个应该是QR迭代收敛的最终形式了吧。 我们后面会再详细研究一下。